A geração de resultados a partir de dados remotos pode ser produto de interpretações visuais ou ópticas e de processamentos digitais de classificações dos pixels. Para Moreira (2007, p. 204), a interpretação visual ou fotointerpretação “é o processo em que o intérprete utiliza um raciocínio lógico, dedutivo e indutivo para compreender e explicar o comportamento de cada objeto contido nas fotos. A rigor é realizada com base em certas características […]”. Nas interpretações visuais, o fotointérprete deve reconhecer os padrões dos objetos através de elementos essenciais para a distinção entre eles, que são: sombreamento, tonalidade e cor, tamanho e forma, textura, padrão e localização. (FITZ, 20018, p. 123).
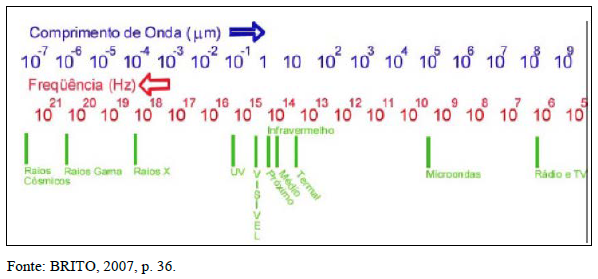
Na interpretação visual de imagens orbitais, podem ser selecionadas as bandas espectrais que melhor representem os alvos, ao invés de serem trabalhadas composições Red, Green, Blue (RBG), cujo padrão é facilmente reconhecível pelo olho humano. O sistema RBG é utilizado nos televisores e monitores. Vermelho, verde e azul correspondem às três colorações básicas do espectro do visível; são chamadas de cores primárias, pois a partir da combinação delas podem ser geradas quaisquer outras cores.
“Quando selecionamos […] canais e filtros para uma composição colorida, temos que conhecer o comportamento espectral do alvo de nosso interesse. Sem conhecê-lo, corremos o risco de desprezar faixas espectrais de grande significância na sua discriminação.” (NOVO, 1992, p. 180).
A seleção de diferentes bandas pode promover a distinção entre elementos. Além disso, as técnicas de realce podem ser importantes aliadas nestas distinções durante as interpretações visuais, elas tem a finalidade de melhorar a qualidade visual da imagem, a ampliação do contraste das imagens e a geração de composições coloridas a partir das bandas disponíveis e potencialidades de cada uma delas. Estas são técnicas simples e que permitem realçar objetos e facilitar as análises.
Potencialidades das imagens Landsat 1 e 2
MSS 1 e MSS 2 / Banda 4 – Verde
Sedimentos em suspensão e corpos d’água rasos.
MSS 1 e MSS 2 / Banda 5 – Vermelha
Características de agricultura.
MSS 1 e MSS 2 / Banda 6 – Infravermelho Próximo 1
Limites entre as formas: terra, água e relevo.
MSS 1 e MSS 2 / Banda 7 – Infravermelho Próximo 2
Maior penetração atmosférica, enfatiza os limites entre as formas.
Potencialidades das imagens Landsat 5
TM 5 / Banda 1 – Azul
Apresenta grande penetração em corpos de água, com elevada transparência, permitindo estudos batimétricos. Apresenta sensibilidade a plumas de fumaça oriundas de queimadas ou atividade industrial e apresentar atenuação pela atmosfera.
TM 5 / Banda 2 – Verde
Apresenta grande sensibilidade à presença de sedimentos em suspensão, possibilitando sua análise em termos de quantidade e qualidade. Boa penetração em corpos de água.
TM 5 / Banda 3 – Vermelho
Discrimina as encostas e a vegetação. Bom contraste entre as áreas ocupadas com vegetação. É a banda mais utilizada para delimitar a mancha urbana, incluindo identificação de novos loteamentos. Permite a identificação de áreas agrícolas.
TM 5 / Banda 4 – Infravermelho Próximo
Enfatiza o teor de biomassa e os rios. Os corpos de água absorvem muita energia nesta banda e ficam escuros, permitindo o mapeamento da rede de drenagem e delineamento de corpos de água. Apresenta sensibilidade à morfologia do terreno.
TM 5 / Banda 5 – Infravermelho Médio 1
Penetra nas nuvens menos espessas e permite detectar o teor de umidade do solo.
TM 5 / Banda 6 – Infravermelho Termal
Apresenta sensibilidade aos fenômenos relativos aos contrastes térmicos, servindo para detectar propriedades termais de rochas, solos, vegetação e água. *Resolução de 120m
TM 5 / Banda 7 – Infravermelho Médio 2
Rochas hidrotermicamente alteradas associadas a depósitos minerais.
Fontes: INPE. Disponível em http://www.dgi.inpe.br/Suporte/files/Cameras-LANDSAT57_PT.php e USGS. Disponível em https://landsat.usgs.gov/what-are-best-spectral-bands-use-my-study. Acesso em 13 dez. 2017.
A interpretação visual de imagens é um procedimento executado com base em características específicas das imagens como padrão, cor, tonalidade, entre outros já abordados. Contudo, quando executado em imagens orbitais, existem outras características que podem contribuir para a análise dos dados, tais como: a época de obtenção da imagem, as bandas disponíveis e as escalas de trabalho. A época de obtenção das imagens é importante para estabelecer relações com outros componentes, sejam regimes pluviométricos, ciclos de agricultura ou até mesmo queimadas ou desastres naturais. A disponibilidade de bandas na imagem escolhida é também importante, pois permite o realce de alvos a partir das composições coloridas, quando são imagens multiespectrais. E as escalas de trabalho são essenciais para o melhor aproveitamento dos dados; a escolha do material para a elaboração de um resultado deve estar orientada aos objetivos do trabalho, observando-se sempre se os resultados necessários podem ser extraídos de forma adequada das fontes selecionadas.
Florenzano (2008, p. 39) coloca que “a partir dos elementos de interpretação de imagens, podem ser elaboradas chaves (modelos) de interpretação.” As chaves de interpretação são agrupamentos de características específicas que definem um alvo e podem ser desenvolvidas pelo próprio intérprete. É um procedimento metodológico de interpretação que busca padronizar os resultados obtidos. Florenzano (2008, p. 52 – 54) apresenta exemplos de chaves de interpretação de objetos e feições representadas em imagens TM e ETM+ Landsat utilizando a composição 3 (B), 4 (G) e 5 (R), ou seja, a banda 3 no canal azul, a banda 5 no canal verde e a banda 5 no canal vermelho. Desta forma, o autor sugere que os corpos d’água (rios, lagos, represas e oceano) obedeceriam à seguinte chave de interpretação: “cor azul (material em suspensão) ou preta (água limpa); textura lisa; forma irregular, linear retilínea ou curvilínea para os rios” (FLORENZANO, 2008, p. 53)
Já Moreira (2007, p. 245) propõe o método sistemático como alternativa às chaves de interpretação. No método sistemático é aplicada uma sequência lógica de etapas de fotointerpretação: fotoleitura, fotoanálise e fotointerpretação.
Fonte: Exame de Qualificação Doutorado PPGMA-UERJ. Teixeira, 2018. A Lagoa de Itaipu: (re)conhecimento a partir de diálogos no mundo vivido